

Na Twitteru jsem zahlédl zajímavého robůtka OttoDIY. Mám doma micro:bit, tak jsem se rozhodl něco podobného vytvořit na této platformě a z mého oblíbeného kartonu. A protože mám 2 dcery, se kterými jsme to tvořili, není to Otto, ale Ottilie a je to princezna.
Co je potřeba
Konstrukce je převážně z kartonu:
- Karton
- lepidlo
- lepící páska
- špejle
- pokud chcete šaty, tak kus látky, jehla a nit
Elektronika postavená na micro:bitu
- 2x micro:bit (druhý je ovladač, není nezbytný)
- 4x servo motor, já použil 9g mikro servo motor SG90 – 180°, ale příště bych asi použil něco silnějšího
- Ovladač motorů, který umožní do nich pustit 5 voltů
- Baterie a držák na ně (použil jsem 6 AA baterií)
Tvorba robota
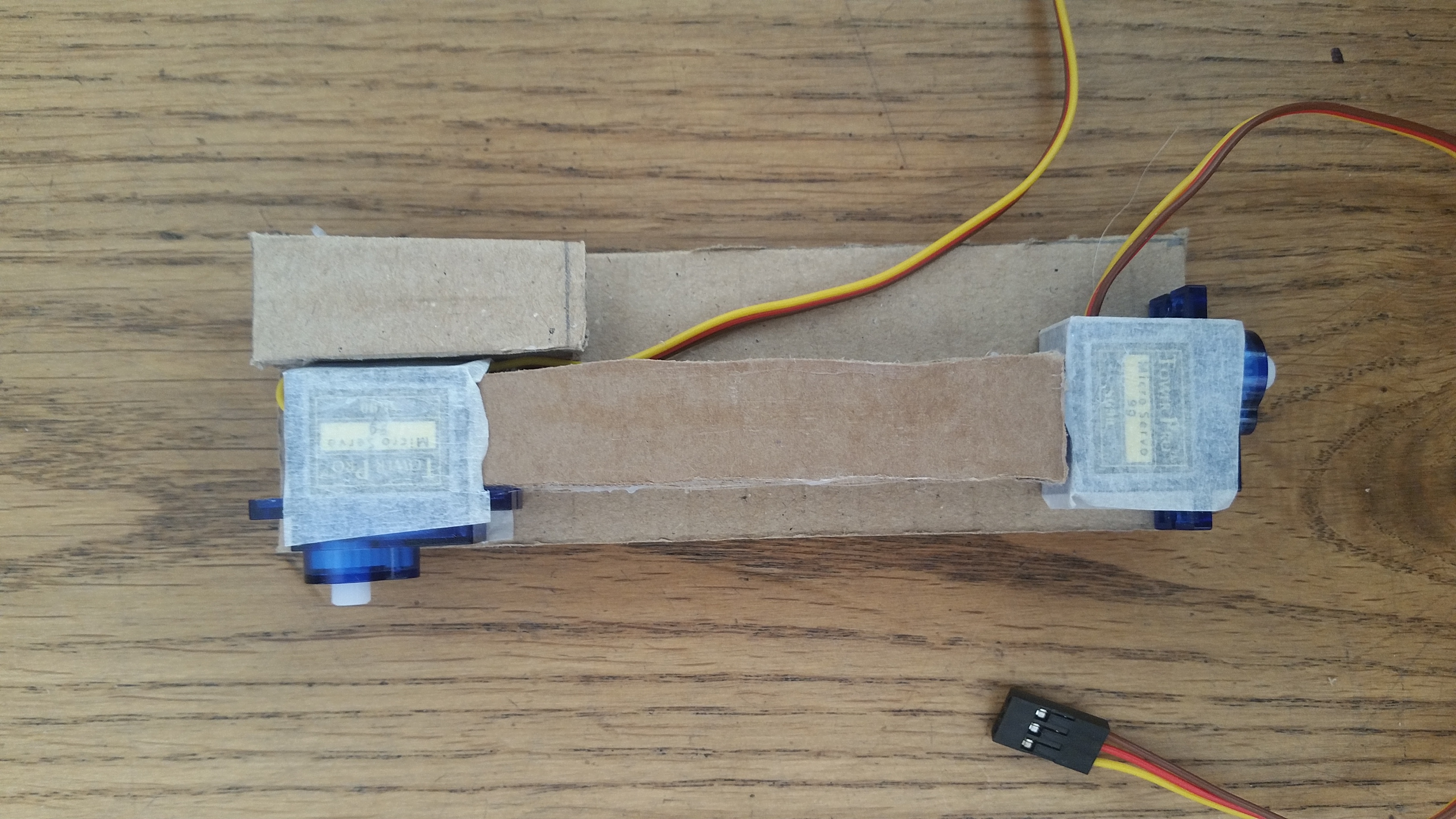
Začneme nejsložitější částí, což jsou nohy. Do nich jsem umístil oba motory. Jeden ovládá chodidlo – jeho náklon na vnější nebo vnitřní boční hranu. Druhý ovládá otočení nohy vůči tělu. Naproti chodidlovému motoru je ještě kousek špejle, která pomáhá držet chodidlo. Ideálně je ve stejné ose jako je osa motoru. Jednoduše jsem ji do kartonu zapíchl a zakapal sekundovým lepidlem a pěkně držela. Asi nejlepší je fotka. Poté jsem to celé omotal páskou.
Další věc je chodidlo. To je vytvořené ze 3 vrstev kartonu. Spodní vrstva je prostě obdélník příslušných rozměrů. Druhá a třetí vrstva mají na stejném místě vyříznuté 3 strany obdélníku, takže se dá vnitřní kus kartonu zvednout. Každá z těchto 2 vrstev má zbývající nevyříznutou stranu na opačném konci, takže po zvednutí obou vzniknou úchyty pro nohu.
Tělo je v zásadě triviální. Chtěl jsem, aby bylo možné micro:bit vyndat bez destrukce robota, takže jsem vytvořil pouze obdélníkovou mističku z kartonu. ke které jsem ze spodu přidělal nohy. Zbytek těla už je čistě na vaší fantazii. Já jsem zvolil dvakrát přehnutý kartonový obdélník o šířce vnitřku mističky, který se shora do mističky prostě jenom zasune (tzn. robot má plné boky, ale zepředu a ze zadu je ve skutečnosti děravý). A jako ruce jsem použil variaci na sloní chobot.
Protože se mi při naklánění do stran vylamovaly nohy od těla, přidal jsem ještě „spodničku“. Trubky, které jsou nasunuté na nohy a přidělané k tělu. Nebrání otáčení nohou, ale pomáhají udržet vylomení.
Krk, hlava, vlasy, šaty, to už je taková zábava s dětmi. Dělal jsem si srandu, že když máte holky co mají rády robůtky, skončíte tak, že šijete šaty.
Programování
Naprogramované je to v Pythonu. Program se postupně hodně vyvíjel. Nejdřív jsem začal jednoduchým testováním a přímým zápisem k pinům. Pak jsem si udělal funkce na hýbání levým chodidlem, pravou nohou a pod. Pak jsem zjistil, že potřebuji otočení servo motoru udělat pomaleji, takže jsem to rozkrokoval. Pak jsem ale zjistil, že by se mi hodilo dělat několik změn najednou, a tak vznikl výsledný design, kde je funkce, která bere jako parametr seznam změn a tyto změny plynule provede. Respektive 2 funkce, kde jedné předáváme cílový stav a druhé změnu od aktuální hodnoty.
Poučení
Ne všechno šlo hladce, poučení do příště:
- Použil bych jiná odolnější serva. Micro:bit s bateriemi docela dost váží, tak jsem musel robota udělat většího a celé to pak serva nezvládala.
- Dobře si rozmyslet, v jakém směru bude působit na spoj největší síla a podle toho orientovat součástky. Kříž, který se přidělá na osu servo motoru není čtvercový, ale v jednom směru má ramena výrazně delší. Původně jsem delší ramena na spoji nohy-tělo přidělal v předo-zadním směru, než jsem pokusem zjistil, že v tomto místě je mnohem větší tlak do boku.
- Vyladit jaký náklon robot vydrží chvíli trvá viz video v úvodu odstavce. Nakonec jsem přidal „spodničku“ – trubičky, které nebrání otáčení nohy, ale pomáhají udržet aby se nevylomila od těla.
Ale výsledek stojí za to